I’m a sucker for a piece of hardware that bends the rules of structural engineering. But I’m an even bigger fan of engineering vengeance.
Back in 1985, a Polaroid electrical engineer named William Freeman pitched a radical idea to the Innovative Design Fund competition: a 3-sided zipper. Instead of fastening a flat 2D plane like a jacket, this mechanism would zip three separate strips into a rigid, 3D triangular tube. The goal was to create a structural switch that could seamlessly turn soft, collapsible gear into rigid beams.
The judges rejected it. Freeman, unbothered, patented the prototype, shoved it in his garage, and moved on.
Fast forward over 40 years. Freeman is now an MIT professor, and modern 3D printing just proved him completely right. Revived by researchers at the MIT Computer Science and Artificial Intelligence Laboratory (CSAIL), the “Y-Zipper” isn’t just a quirky textile trick—it’s the missing link in soft robotics, fast-deploying architecture, and smart medical braces.
Let’s tear down how this works, look at the brutal durability tests, and explore why it took four decades for manufacturing tech to finally catch up.
The Physics of Tunable Stiffness
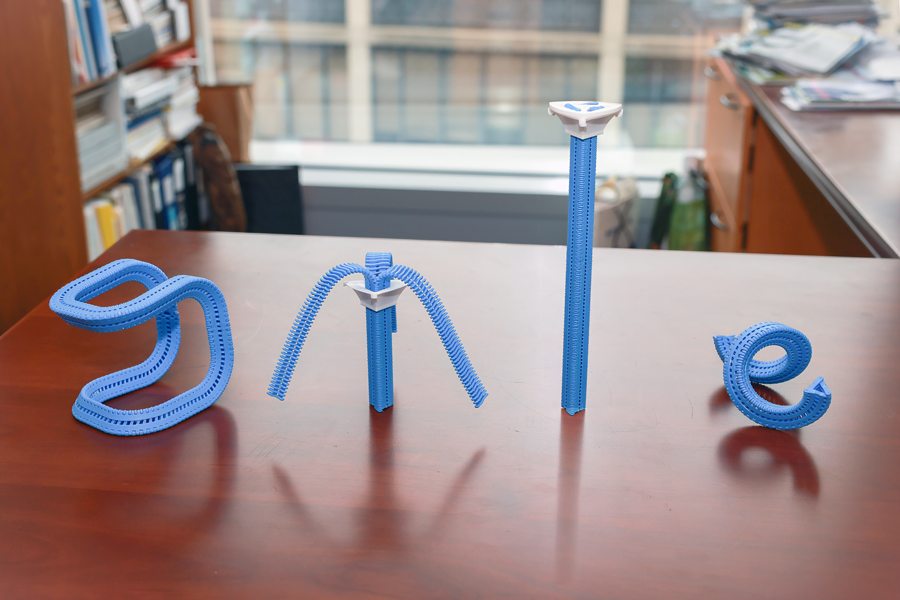
Standard zippers connect two flexible edges. The Y-Zipper takes three flexible polymer bands with highly specific interlocking “teeth” and feeds them through a specialized 3D slider.
When unzipped, the bands are totally floppy—you can roll them up, pack them in a tiny box, or bend them around a human wrist. When zipped, the triangular geometry locks the teeth together, immediately converting the soft bands into a rigid, load-bearing column. In engineering terms, this is called tunable stiffness.
Pro-Tip: If you’re designing hardware that needs to collapse for transport but bear weight during operation (think drone arms or space deployables), tunable stiffness is your holy grail. Moving away from heavy, complex mechanical linkages to a simple zipped column saves massive amounts of weight and points of failure.
“A regular zipper is great for closing up flat objects, like a jacket, but Freeman ideated something more dynamic,” notes Jiaji Li, the lead CSAIL researcher on the modern revival. “Using current fabrication technology, his mechanism can transform more complex items.”
Why Now? The 3D Printing Advantage
So why couldn’t Freeman build this at scale in ‘85? Tolerances and materials.
You can’t easily injection-mold or mill the complex, microscopic interlocking teeth required for this to work without binding. Worse, combining flexibility (to roll up) with rigidity (to bear weight) requires a very specific mix of plastics.
The MIT team solved this by developing custom software that parametrically generates Y-Zipper designs, which are then natively 3D printed using a mix of TPU (Thermoplastic Polyurethane) and PLA.

The Durability Numbers
I know what you’re thinking: It’s 3D printed plastic. Won’t it snap immediately under load?
I had the same skepticism. But the researchers battered this mechanism in the lab. Through 3D simulation and physical testing, they found that the elastic nature of the TPU actually distributes stress beautifully across the structure.
Here’s the raw data from their fatigue and stress tests:
| Metric / Setup | Spec / Limit | Real-World Translation |
|---|---|---|
| Max Load (0.8mm TPU Bridge) | 11 kg | Easily supports consumer electronics. |
| Max Load (2.0mm TPU Bridge) | 18 kg | Viable for heavy structural supports. |
| Weight-to-Load Ratio | 120g holds 6kg max | Incredible strength-to-weight efficiency. |
| Fatigue Life | 18,000+ cycles | Lasted nearly 40 continuous hours. |
| Actuation Time | < 60 seconds | 4 actuators parallel-zipping a tent pole. |
Code to Hardware: How the Y-Zipper Shines
The true power of the Y-Zipper is when it’s automated. By hooking the slider up to a micro-actuator (like a rotary encoder and a small motor), you can programmatically command structures to grow or shrink.
Imagine you are scripting the behavior of a quadruped robot that needs to squeeze under a collapsed building. Instead of heavy pneumatic legs, it uses Y-Zippers. The logic is brutally simple:
class YZipperLeg:
def __init__(self, max_length_mm=360):
# Starts in the unzipped, compact state
self.length = 60
self.max_length = max_length_mm
self.is_rigid = False
def actuate(self, target_length_mm, time_sec=3.0):
if target_length_mm > self.max_length:
raise ValueError("Exceeds structural integrity limit")
# Actuator zips the 3-sided mechanism
self.length = target_length_mm
self.is_rigid = (self.length > 60)
print(f"Leg morphed to {self.length}mm.")
print(f"Structural State: {'Rigid Column' if self.is_rigid else 'Soft'}")
# Robot approaches a 160mm obstacle
leg = YZipperLeg()
leg.actuate(target_length_mm=245) # Robot stands up to step over
In the real-world lab tests, a quadruped robot actually executed this exact maneuver, shifting its height from 60mm to 245mm in under 3 seconds to clear obstacles.
4 Killer Applications
Because the Y-zipper scales, the potential use cases are staggering:
- Deployable Shelters: Swap out annoying tent poles for a Y-zipper. The MIT team erected a tent in manually under 60 seconds. With micro-actuators? It basically sets itself up.
- Dynamic Medical Braces: Wear a soft, comfortable 3D-printed wrist sleeve during the day. At night, run the slider up, and it transforms into a rigid cast to keep your bones perfectly isolated.
- Shape-Shifting Robots: As shown in the code above, robotic limbs that can literally roll themselves up into a chassis.
- Art and Stage Installations: The team created a “dynamic vine” that sits at 12cm, but when actuated, fluidly zips itself into a 1.3-meter tall flower.
See It In Action
Reading about a 3D structural zipper is one thing, but watching it actuate in real time is wild. Check out the MIT CSAIL breakdown here:
The Next Iteration
We are just scratching the surface here. The MIT team is already eyeing SLA (Stereolithography) printing for tighter tolerances and even metal alloys for heavy-duty industrial and space exploration applications.
If you’re building hardware right now, whether it’s drone landing gear or custom IoT enclosures, ask yourself: Does this need to be a static part, or could a Y-Zipper make it dynamic?
Let me know in the comments how you’d utilize tunable stiffness in your next build. I’m thinking about hacking a scaled-down version for a collapsible camera rig. Time to fire up the 3D printer.